
1. Yhteenveto
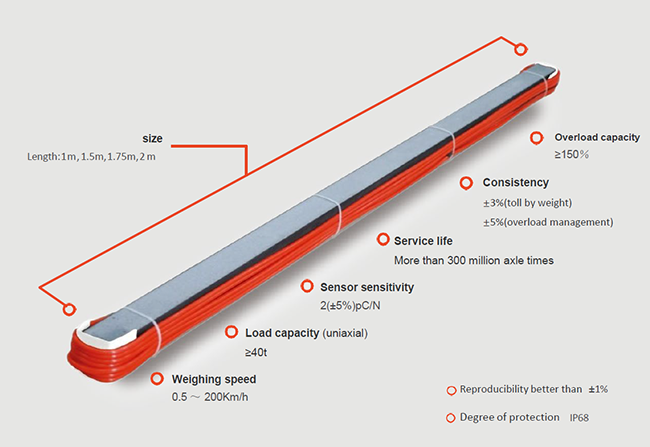
CET8312 pietsosähköisellä kvartsidynaamisella punnitusanturilla on laaja mittausalue, hyvä pitkän aikavälin vakaus, hyvä toistettavuus, korkea mittaustarkkuus ja korkea vastetaajuus, joten se sopii erityisen hyvin dynaamiseen punnituksen havaitsemiseen. Se on jäykkä, nauhamainen dynaaminen punnitusanturi, joka perustuu pietsosähköiseen periaatteeseen ja patentoituun rakenteeseen. Se koostuu pietsosähköisestä kvartsikidelevystä, elektrodilevystä ja erityisestä palkkilaakerilaitteesta. Jaettu 1 metrin, 1,5 metrin, 1,75 metrin ja 2 metrin kokoisiin eritelmiin, voidaan yhdistää useisiin eri mittaisiin tieliikenneantureihin, jotka voidaan mukauttaa tienpinnan dynaamisiin punnitustarpeisiin.
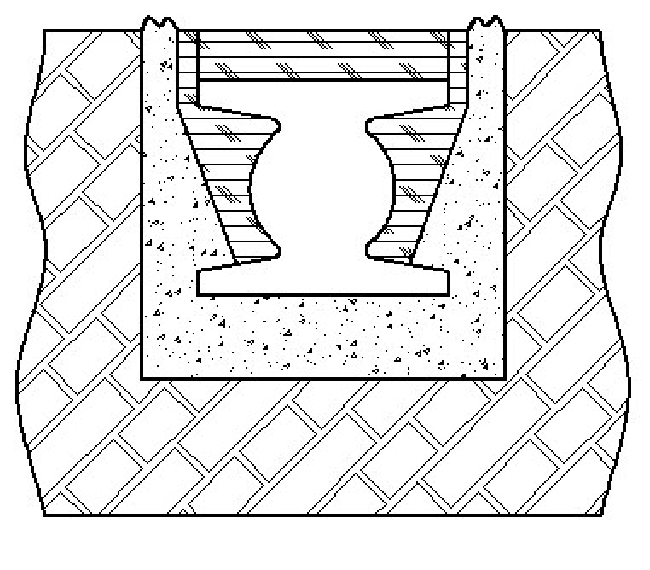
2. Kuva CET8312:sta
3.Tekniset parametrit
| Poikkileikkauksen mitat | (48mm+58mm)*58mm | ||
| Anturin pituus | 1 m / 1,5 m / 1,75 m / 2 m | ||
| Kaapelin pituus | 25 metristä 100 metriin | ||
| Akselin punnitus (yksi) | ≤40 t | ||
| Ylikuormituskapasiteetti | 150 % FS | ||
| Kuormitusherkkyys | 2±5 % pC/N | ||
| Nopeusalue | 0,5 km/h - 200 km/h | ||
| Suojausluokka | IP68 | Lähtöimpedanssi | >1010Ω |
| Työlämp. | -45-80 ℃ | Lähtölämpötilan vaikutus | <0,04 %FS/℃ |
| Sähköliitäntä | Korkeataajuinen staattisen kohinan koaksiaalikaapeli | ||
| Laakerin pinta | Laakeripinta voidaan kiillottaa | ||
| Epälineaarinen | ≤±2 % FS (anturien staattisen kalibroinnin tarkkuus kussakin pisteessä) | ||
| Johdonmukaisuus | ≤±4 % FS (anturin eri sijaintipisteiden staattinen kalibrointitarkkuus) | ||
| Toistavuus | ≤±2 % FS (samassa paikassa olevien antureiden staattisen kalibroinnin tarkkuus) | ||
| Integroitu tarkkuustoleranssi | ≤±5 % | ||
4. Asennusmenetelmä
1) Kokonaisrakenne
Jotta varmistetaan koko anturin asennuksen testausvaikutus, paikan valinnan tulee olla tiukkaa. On ehdotettu, että jäykkä sementti
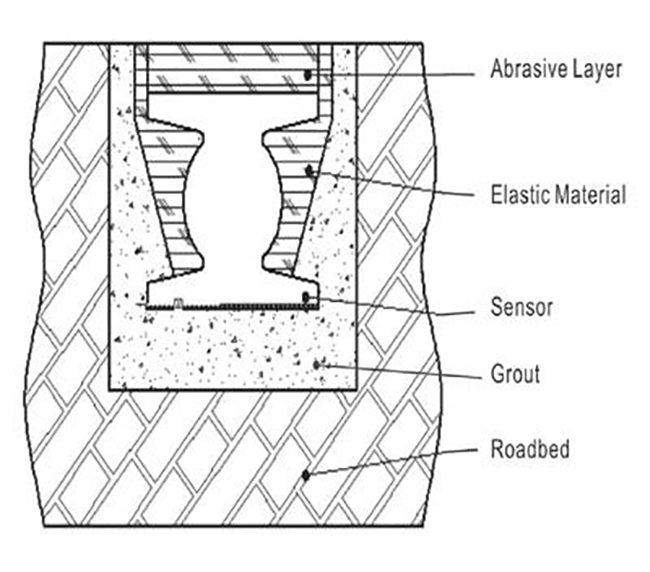
Anturin asennusperustaksi tulee valita päällyste ja joustava päällyste, kuten asfaltti, uudistaa. Muutoin mittaustarkkuuteen tai anturin käyttöikään saattaa olla vaikutusta.
2) Asennusteline
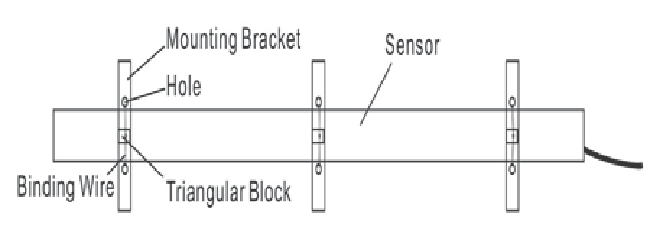

Paikan selvittämisen jälkeen kiinnitetään anturien mukana toimitettu rei'itetty kiinnitysteline pitemmällä sidontateipillä anturiin, jonka jälkeen kiinnitetään pienellä kolmiomaisella puupalalla sidontahihnan ja asennustelineen väliseen rakoon, jotta se voidaan kiristää. Jos työvoimaa riittää, vaiheet (2) ja (3) voidaan suorittaa samanaikaisesti. Kuten yllä näkyy.
3) Jalkakäytävän uritus
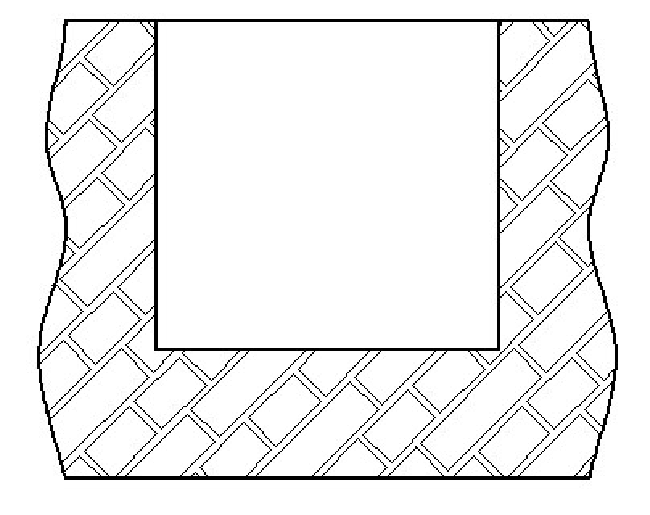
Käytä viivainta tai muuta työkalua määrittääksesi dynaamisen punnitusanturin asennusasento. Leikkuukonetta käytetään suorakaiteen muotoisten urien avaamiseen tiellä.
Jos urat ovat epätasaisia ja niissä on pieniä kuoppia urien reunassa, urien leveys on 20 mm suurempi kuin anturin, urien syvyys on 20 mm suurempi kuin anturin ja 50 mm pidempi kuin anturin. Kaapeliura on 10 mm leveä, 50 mm syvä;
Jos urat on tehty huolella ja urien reunat ovat sileät, urien leveys on 5-10 mm suurempi kuin antureilla, urien syvyys on 5-10 mm suurempi kuin antureilla ja urien pituus on 20-50 mm suurempi kuin antureilla. Kaapeliura on 10 mm leveä ja 50 mm syvä.
Pohja leikataan, urissa oleva liete ja vesi puhalletaan puhtaaksi ilmapumpulla (kuivataan perusteellisesti laastin täyttämiseksi) ja kiinnitetään urien molemmin puolin yläpinta teipillä.
4) Ensimmäinen saumaus
Avaa asennuslaasti määrätyssä suhteessa valmistelemaan sekoitettu laasti, sekoita laasti nopeasti työkaluilla ja kaada sitten tasaisesti
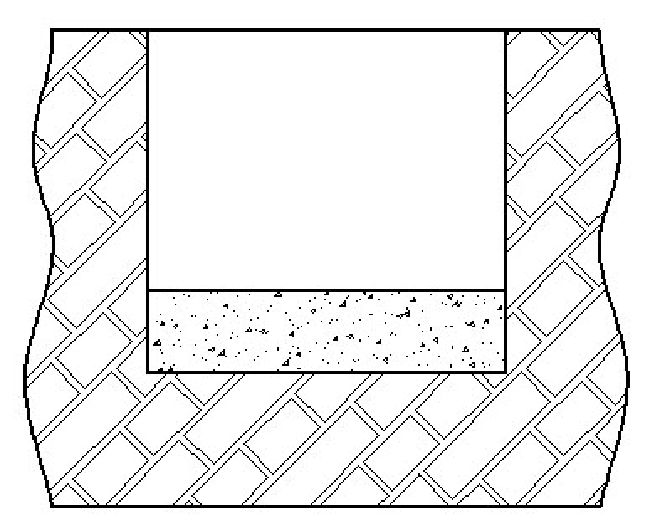
uran pituussuuntaan, uran ensimmäisen täytön tulee olla alle 1/3 uran syvyydestä.
5) Anturin sijoitus
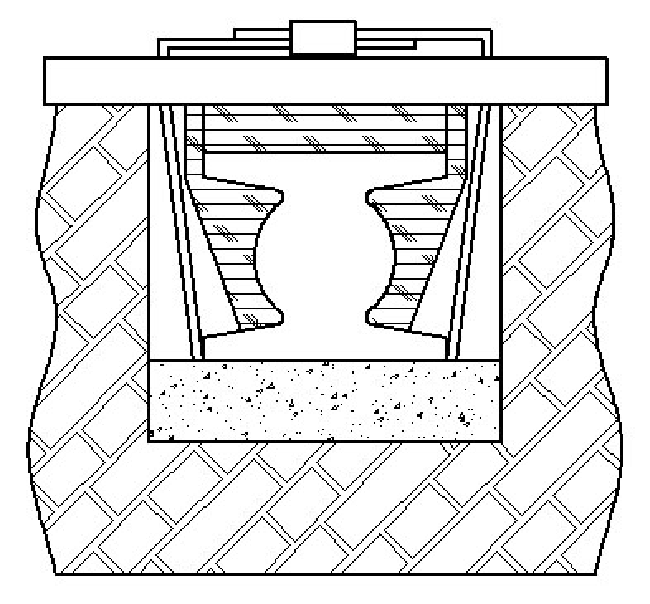
Aseta anturi asennuskiinnikkeineen varovasti laastilla täytettyyn uraan, säädä asennustelinettä ja anna jokaisen tukipisteen koskettaa raon yläpintaa ja varmista, että anturi on raon keskellä. Kun samaan paikkaan on asennettu kaksi tai useampi anturi, on kiinnitettävä erityistä huomiota liitäntäosaan.
Kahden anturin yläpinnan tulee olla samalla vaakatasolla ja liitoksen tulee olla mahdollisimman pieni, muuten syntyy mittausvirhe. Säästä mahdollisimman paljon aikaa vaiheissa (4) ja (5), tai laasti kovettuu (1-2 tuntia liimamme normaalista kovettumisajasta).
6) Asennustelineen ja toisen injektion poistaminen
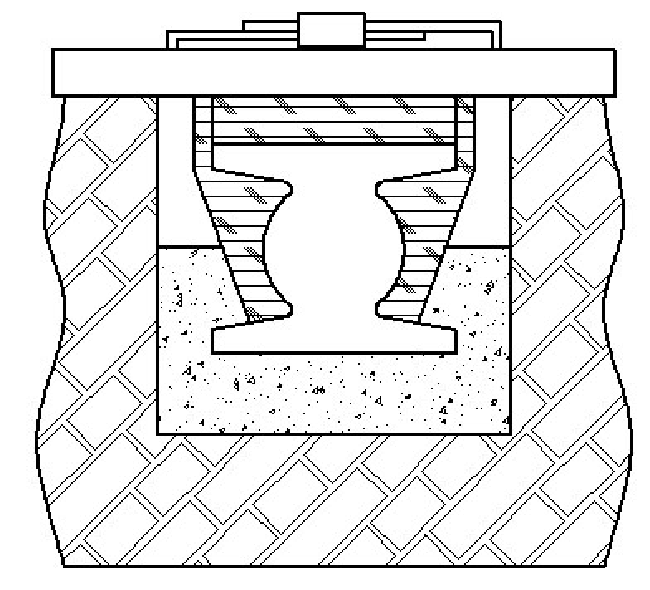
Kun laasti on periaatteessa kovettunut, tarkkaile anturin alkuasennuksen vaikutusta ja säädä sitä tarvittaessa ajoissa. Kaikki on periaatteessa valmis, poista kannatin ja jatka toista saumausta. Tämä ruiskutus on rajoitettu anturin pinnan korkeuteen.
7) Kolmas saumaus
Kovettumisen aikana on aina huomioitava injektioainemäärän lisääminen, jotta täytön jälkeen laastin kokonaistaso on hieman korkeampi kuin tien pinta.
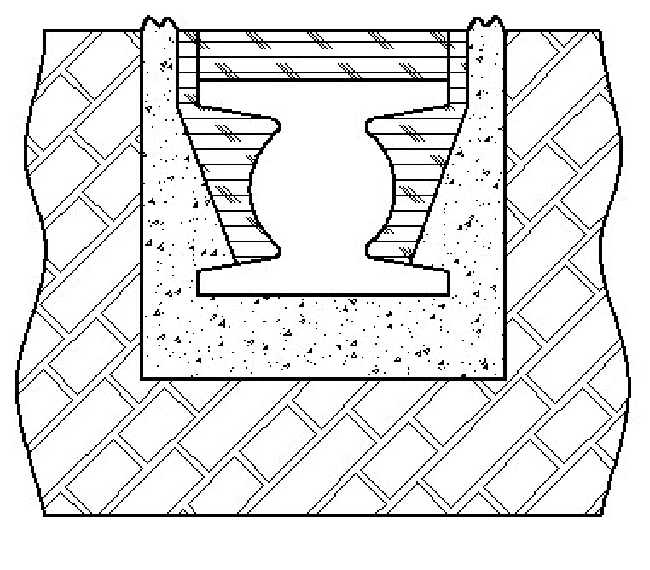
8) Pinnan hionta
Kun kaikki asennuslaasti on saavuttanut kovettumislujuuden, repäise teippi ja hio urapinta ja tien pinta, suorita esikuormitustesti tavallisella ajoneuvolla tai muilla ajoneuvoilla tarkistaaksesi, onko anturin asennus kunnossa.
Jos esikuormitustesti on normaali, asennus on
valmiiksi.
5.Asennusohjeet
1) On ehdottomasti kiellettyä käyttää anturin toiminta-alueen ja käyttölämpötilan ulkopuolella pitkään.
2) On ehdottomasti kiellettyä mitata anturin eristysvastusta korkearesistanssimittarilla yli 1000 V.
3) Ei-ammattimainen henkilökunta on ehdottomasti kielletty tarkistamasta sitä.
4) Mittausaineen tulee olla yhteensopiva alumiinimateriaalien kanssa, muuten tilauksen yhteydessä vaaditaan erityisiä ohjeita.
5) Anturin L5/Q9 lähtöpää tulee pitää kuivana ja puhtaana mittauksen aikana, muuten signaalilähtö on epävakaa.
6) Anturin painepintaan ei saa lyödä tylsällä instrumentilla tai raskaalla voimalla.
7) Varausvahvistimen kaistanleveyden tulee olla suurempi kuin anturin, paitsi että taajuusvasteelle ei ole erityisiä vaatimuksia.
8) Antureiden asennus tulee suorittaa tiukasti ohjeiden asiaankuuluvien vaatimusten mukaisesti, jotta saavutetaan tarkka mittaus.
6. Liitteet
Manuaalinen 1 kpl
Varmentamisen pätevyys 1 kpl Todistus 1 kpl
Hangtag 1 kpl
Q9 lähtökaapeli 1 kpl

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdun toimisto: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Hongkongin toimisto: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Postitusaika: 19.8.2024




