
Nykyaikaisen liikenteenohjauksen tie- ja siltakuormituksen seurannan kasvavan kysynnän myötä Weigh-In-Motion (WIM) -tekniikasta on tullut olennainen työkalu liikenteen hallinnassa ja infrastruktuurin suojaamisessa. Envikon erinomaisella suorituskyvyllä ja luotettavuudella varustettuja kvartsianturituotteita on käytetty laajasti WIM-järjestelmissä.
Kvartsisen Weigh-In-Motion (WIM) -algoritmien periaatteet
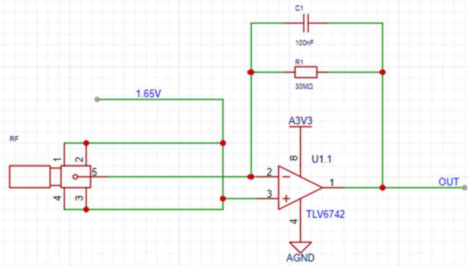
Kvartsi Weigh-In-Motion (WIM) -järjestelmän ydin on mitata ajoneuvojen tienpintaan kohdistamaa painetta reaaliajassa tielle asennettujen kvartsianturien avulla. Kvartsianturit käyttävät pietsosähköistä vaikutusta painesignaalien muuntamiseen sähköisiksi signaaleiksi. Näitä sähköisiä signaaleja vahvistetaan, suodatetaan ja digitoidaan, ja niitä käytetään lopulta ajoneuvon painon laskemiseen.
Envikon WIM-järjestelmissä käytettävillä kvartsiantureilla on korkea herkkyys ja laajat taajuusvasteominaisuudet, joten ne pystyvät mittaamaan tarkasti hetkelliset paineen muutokset ajoneuvojen ohittaessaan niitä. Lisäksi kvartsiantureilla on erinomainen lämpötilan vakaus ja pitkä käyttöikä, mikä ylläpitää vakaata suorituskykyä erilaisissa ankarissa ympäristöissä.
Weigh-In-Motion (WIM) -algoritmin vaiheet
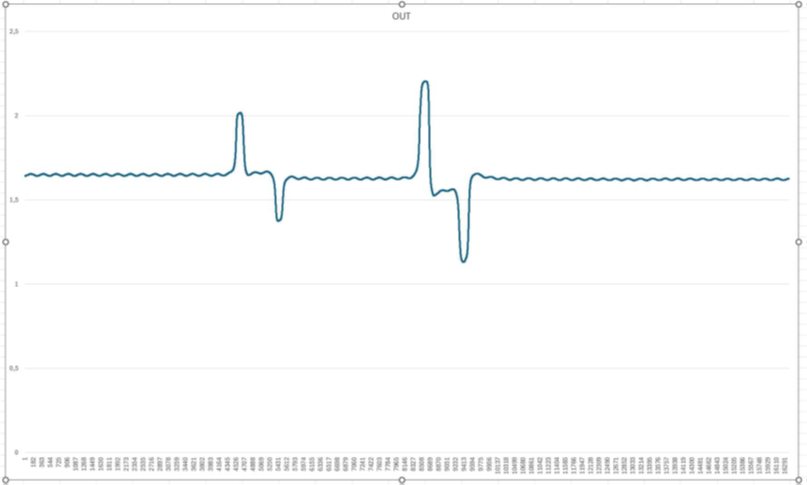
1.Signaalin hankinta: Tallenna ohi kulkevien ajoneuvojen aiheuttamat painesignaalit kvartsiantureilla, muuntaa nämä signaalit sähköisiksi signaaleiksi ja lähettää ne tiedonkeruujärjestelmään.
2.Signaalin vahvistus ja suodatus: Vahvista ja suodata hankittuja sähköisiä signaaleja kohinan ja häiriön poistamiseksi säilyttäen hyödylliset painotiedot.
3.Tietojen digitalisointi: Muunna analogiset signaalit digitaalisiksi signaaleiksi myöhempää käsittelyä ja analysointia varten.
4.Perustason korjaus: Suorita perusviivakorjaus signaaleille nollakuorman poikkeaman poistamiseksi, mikä varmistaa mittaustarkkuuden.
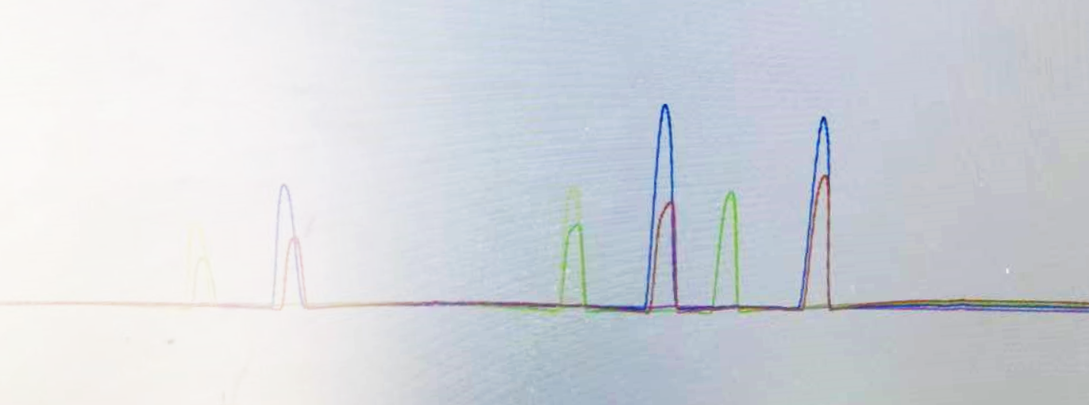
5.Integrointikäsittely: Integroi korjatut signaalit ajan mittaan laskeaksesi kokonaislatauksen, joka on verrannollinen ajoneuvon painoon.
6.Kalibrointi: Käytä ennalta määritettyjä kalibrointikertoimia muuntaaksesi kokonaislatauksen todellisiksi painoarvoiksi.
7.Painon laskeminen: Jos käytetään useita antureita, laske kunkin anturin painot auton kokonaispainon saamiseksi.
Algoritmien ja tarkkuuden välinen suhde
Weigh-In-Motion (WIM) -järjestelmän tarkkuus riippuu pitkälti käytetyistä algoritmeista. Envikon kvartsianturit varmistavat painon mittaustarkkuuden erittäin tarkan signaalinkeräyksen ja -käsittelyn avulla. Tietojenkäsittelyalgoritmien tarkkuus ja tehokkuus vaikuttavat suoraan lopullisiin punnitustuloksiin. Kehittyneet signaalinkäsittely- ja data-analyysialgoritmit voivat parantaa tehokkaasti punnitustarkkuutta ja vähentää mittausvirheitä.
Erityisesti signaalin hankinnan tarkkuus, kohinan suodatuksen tehokkuus sekä integrointi- ja kalibrointiprosessien tarkkuus ovat avaintekijöitä, jotka vaikuttavat punnitustarkkuuteen. Envikon kvartsianturit ovat näillä alueilla erinomaisia varmistaen WIM-järjestelmien korkean tarkkuuden ja luotettavuuden kehittyneiden algoritmien ja laadukkaiden laitteistojen avulla.
Asennuksen ja tarkkuuden suhde

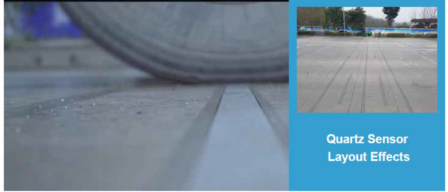
Kvartsianturien asennuspaikka ja -tapa vaikuttavat merkittävästi WIM-järjestelmän mittaustarkkuuteen. Anturit tulee asentaa avainkohtiin ajoneuvon reitillä varmistaakseen maksimaalisten paineen muutosten tarkan talteenoton. Asennuksen aikana on tärkeää varmistaa anturien ja tienpinnan välinen tiivis kosketus, jotta vältytään virheellisestä asennuksesta johtuvilta mittausvirheiltä.
Lisäksi ympäristötekijät, kuten lämpötila, kosteus ja maan tasaisuus, voivat myös vaikuttaa anturin suorituskykyyn ja mittaustarkkuuteen. Vaikka Envikon kvartsiantureilla on erinomainen lämpötilan stabiilisuus, tarvitaan kuitenkin asianmukaisia kompensointitoimenpiteitä äärimmäisissä lämpötiloissa tarkkojen mittaustulosten varmistamiseksi.
Säännöllinen kalibrointi ja huolto ovat myös tärkeitä anturien pitkän aikavälin vakaan toiminnan varmistamiseksi. Ammattimaisen asennuksen ja huollon avulla Envikon kvartsianturien suorituskyky voidaan maksimoida, jolloin saadaan tarkat ja luotettavat dynaamiset punnitustiedot (WIM).
Johtopäätös
Envikon kvartsiantureiden käyttö dynaamisissa punnitusjärjestelmissä (WIM) tarjoaa tehokkaita ja luotettavia ratkaisuja liikenteen hallintaan ja infrastruktuurin suojaamiseen. Tarkan signaalinkeruun, edistyneen algoritmin käsittelyn sekä ammattimaisen asennuksen ja huollon ansiosta dynaamisilla kvartsipunnitusjärjestelmillä (WIM) voidaan seurata ja hallita ajoneuvon painoa reaaliajassa, mikä vähentää tehokkaasti teiden ja siltojen kulumista ja parantaa liikenteen hallinnan tehokkuutta. Jatkuvan teknologisen kehityksen myötä Envikon kvartsiantureilla tulee olemaan yhä tärkeämpi rooli WIM-järjestelmissä ja ne tarjoavat vankan perustan älykkään liikenteen kehitykselle.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdun toimisto: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Hongkongin toimisto: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Postitusaika: 07.08.2024




