
Johdanto
Kuorma-autojen laiton yli- ja ylikuormitus tuhoaa moottoriteitä ja siltarakenteita, mutta myös aiheuttaa helposti tieliikenneonnettomuuksia ja vaarantaa ihmisten hengen ja omaisuuden turvallisuuden. Tilastojen mukaan yli 80 % kuorma-autojen aiheuttamista tieliikenneonnettomuuksista liittyy ylimitoitettuihin ja ylikuormitettuihin kuljetuksiin.
Perinteisellä yliajon ja ylikuormitetun kuljetuksen tarkastuspisteen lainvalvonnan tehokkuus on alhainen, mikä on helppo aiheuttaa ylivuotoajoneuvojen laiminlyönnistä, ja suoran täytäntöönpanon havaitsemispisteen ohjaustila luottaa dynaamiseen automaattiseen punnitus- ja tunnistusjärjestelmään, joka tunnistaa, tunnistaa ja seuloa ohikulkevat ajoneuvot automaattisesti kellon ympäri, jotta yliajoa ja ylikuormitettua ajoneuvoa voidaan valvoa tarkasti ja tehokkaasti. Ylikuormitetun liikennekäyttäytymisen hallinnan vahvistamiseksi, valtatien tilojen sekä ihmisten elämän ja omaisuuden turvallisuuden varmistamiseksi tien ylityksen suoraa valvontajärjestelmää on vähitellen edistetty täysimääräisesti ja sovellettu moottoritiellä, ja valtatien ylitysvalvonta on saavuttanut merkittäviä tuloksia ja valtatien ylitysasteen hallintaa on hallittu 0,5 %:n sisällä ja tavallisten moottoriteiden laiton ylitys ja ylikuormitus on myös ollut tehokasta.
Suoran täytäntöönpanojärjestelmän kehys
1. Hallintojärjestelmän kehys ja tehtävät
Suora täytäntöönpanotapa viittaa asiaankuuluvien tietojen, kuten ohi kulkevien ajoneuvojen painon, automaattiseen hankintaan nopeiden ja tarkkojen dynaamisten punnituslaitteiden läpi, jotta voidaan määrittää, ovatko tavaraajoneuvot ylikuormitettuja ja kuljetettu, ja luottaa tieteellisiin ja teknisiin keinoihin todisteiden hankkimiseksi, ilmoittamiseksi ja käsittelemiseksi.
Liikenneministeriö organisoi ja rakentaa valtakunnallisen verkonhallinnan tietojärjestelmän, ja maakuntajärjestelmän tiedot on yhdistetty ja jaettu, mikä tukee ministeriöiden ja maakuntien välistä yritystoiminnan koordinointia sekä valvoo tehokkaasti valtakunnallista hallintoa ja ylihallintotyötä; Maakuntatason hankkeen järjestää ja rakentaa läänin (autonominen alue, kunnallinen) liikenneosasto toteuttaakseen hallinto- ja palvelutehtäviä lainkäyttöalueella, tukeakseen maakunta-, kunta- ja maakuntatasoa tarkastustyön suorittamisessa ja kytkeytyä ministeriötason järjestelmään.
Esimerkkinä Zhejiangin maakunnan verkottunut hallintojärjestelmä ottaa käyttöön nelikerroksisen rakenteen ja kolmitasoisen hallinnan ylhäältä alas, jotka ovat seuraavat:
1) Maakunnan hallintoalusta
Se toimii kuuden suuren alustan roolissa maakunnan verkottuneessa hallintojärjestelmässä, nimittäin: perustietokeskusalusta, tiedonvaihtoalusta, hallinnollinen rangaistusalusta, kertaluonteinen laiton aputuomioalusta, arviointi- ja arviointialusta sekä tilastoanalyysi- ja näyttöalusta. Ota yhteyttä lääninhallituksen palveluverkkoon saadaksesi asiatietokannan, harkinnanvaraisen tietokannan ja lainvalvontahenkilöstön tietokannan ja raportoida hallinnollisten rangaistusten käsittelytiedot reaaliajassa; Telakointi liikennepoliisin järjestelmään saadakseen tavarankuljetusajoneuvo- ja kuljettajatietoja, kopioida laittomia kuljetustietoja; Telakointi kuljetuksen hallintajärjestelmään saadaksesi tietoa kuljetusyrityksistä, rahtiajoneuvoista jne. ja kopioida laittomat ylitystiedot; Hallintoaseman yhtenäinen asiakirjamalli ja perustiedot sekä mustan listan/lisenssin hallinta; Toteuta apupäätös, jonka mukaan yksi sakko yhdestä ylisuuren kuljetuksen matkasta; Arvioi ja arvioi maakunnan valvonta-asemien toimintaa ja supervalvontaliiketoiminnan toimintaa; Tilastoinnin ja data-analyysin avulla arvioidaan maakunnan hallinto- ja superhallintopolitiikkaa ja annetaan määrällistä tukea politiikan käyttöönotolle; Tarjoa asianmukaista oikeudellista ja lainsäädännöllistä tukea hallintotyölle kaikilla tasoilla ja perustaa yritystietokanta maakunta-, kunta- ja maakuntatasolla.
2) Prefektuuritason hallinnon supermoduuli
Vastaa yrityksen perustietojen kokonaisvaltaisesta hallinnoinnista lainkäyttöalueen sisällä, ylitystietojen tilastollisesta analyysistä, paikallisen kaupungin lainvalvontatarkastuksesta, tapauksen hallinnollisesta uudelleenkäsittelystä, yritysten käyttöönotosta, paikallisen kaupungin tarkastuksesta ja arvioinnista.
3) Piiri- ja maakuntahallinnon supermoduuli
Vastaanota ja tallenna tietoja eri lainkäyttöalueella sijaitsevista ylivoinnin havaitsemispaikoista ja -tiloista (mukaan lukien kaikenlaiset ylityksen havaitsemistiedot, kuvat ja videot). Kerää/tarkista/vahvista alueen laittomat ylitystiedot, tiedostojen arkistointi ja asiaankuuluvat tilastot, analysointi ja näyttö alueella ja läänissä.
4) Suorat valvonta-asemat
Tielle asennettujen dynaamisten punnitus- ja kaappausrikosteknisten laitteiden avulla saadaan ohi kulkevan kuorma-auton paino, rekisterikilpi ja muut asiaankuuluvat tiedot.
2. Suoran täytäntöönpanojärjestelmän kokoonpano ja toiminta
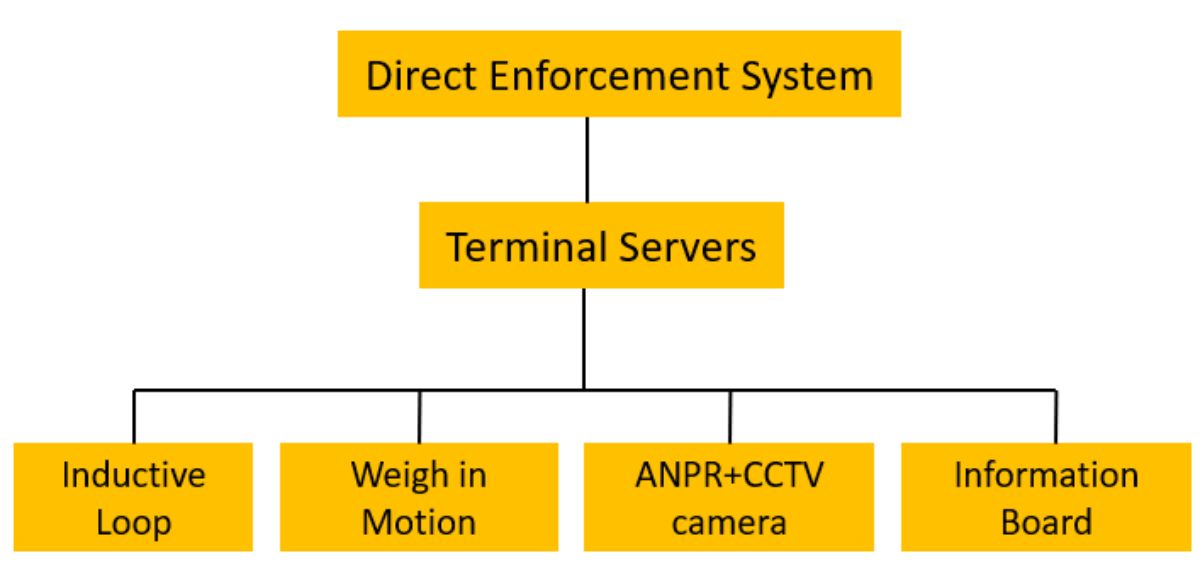
Suoravalvontajärjestelmän kenttälaitteet (katso kuva 1) sisältävät pääasiassa automaattisia punnitus- ja ilmaisulaitteita, ajoneuvojen sieppaus- ja tunnistuslaitteita, laittoman käyttäytymisen ilmoituslaitteita, videovalvontalaitteita jne.
1) Punnituslaitteet: mukaan lukien punnitusanturit, punnitusohjaimet (teolliset tietokoneet), autojen jälleenmyyjät jne., tulee tarkastaa asianomaisten pätevien mittauslaitosten toimesta, ja punnitustuloksia voidaan käyttää rangaistuksen perustana.
2) Teräväpiirtotunnistus- ja tallennuslaitteet: käytetään keräämään kuvia ajoneuvoista, mukaan lukien rekisterikilvet, korin kunto, rekisterikilpien numerot ja värit, jotka voivat tunnistaa ajoneuvot.
3) Videovalvontalaitteet: videovalvontalaitteiden käyttö kuorma-autojen automaattisten punnituksen havaitsemislaitteiden prosessin saamiseksi ja videovalvontalaitteilla saatuja valvontatietoja voidaan käyttää todisteena.
4) Tiedonantolaitteet: muuttuvan informaatiotaulun kautta testattu ja yliajottu ajoneuvo voidaan antaa reaaliajassa ylittämään ilmoitus ja ohjata kuorma-auton kuljettaja lähimmälle purkupaikalle purkamista varten.
Suoran täytäntöönpanon havaitsemispisteiden suunnittelu
Projektipaikan valinta
Ylikuormituksen tehokkuuden parantamiseksi suoran täytäntöönpanon katsastusasemat tulisi valita "yleisen suunnittelun ja yhtenäisen layoutin" periaatteen mukaisesti ja etusijalle tulisi asettaa tiet, joilla on seuraavat ominaisuudet:
1) Kuorma-autot ovat ajettu vakavasti tai kuorma-autojen on ajauduttava tien läpi;
2) tiet, jotka liittyvät tärkeimpiin suojattuihin siltoihin;
3) maakuntarajat, kuntarajat ja muut hallinnolliset alueet risteysteitä;
4) Maaseututiet, jotka ajoneuvojen on helppo kiertää.
2. Punnituslaitoksen suunnittelu
2.1. Dynaamiset kuorma-autovaa'at
Dynaaminen kuorma-autovaaka on automaattinen vaaka, jota käytetään mittaamaan pituussuuntaista massaa (bruttomassa), akselipainoa ja akseliryhmäkuormaa ajoneuvon ohittaessa, ja sillä on pääasiassa kuormaa
Laite, tietojenkäsittelyosa ja näyttölaite koostuvat, jolloin tietojenkäsittelyosa on yleensä suunniteltu ohjauskaapin muotoiseksi. Eri kuljettajien mukaan dynaamiset kuorma-autovaa'at voidaan jakaa ajoneuvotyyppiin, akselipainotyyppiin, kaksoislavatyyppiin, akseliryhmätyyppiin, monijärjestelyjen yhdistelmätyyppiin ja tasalevytyyppiä voidaan pitää myös akseliryhmätyypin luokkana. Kantajan toimintaperiaate on mitata sähköinen signaali, kun kantaja kantaa renkaan kuormitusta, ja muuntaa se sitten ajoneuvon massaan vahvistuksen ja signaalinkäsittelyn avulla, jotka voidaan jakaa kahteen luokkaan: venymämittarityyppi ja kvartsikidetyyppi.
Havaitsemistarkkuuden vaatimusten täyttyessä sopiva dynaaminen kuorma-autovaaka tulee valita tieolosuhteiden mukaan, ja uuden teknologian, korkean tarkkuuden, edullisen ja standardien mukaisen punnituslaitteiston käyttöä olisi rohkaistava ja jonoon ajettavat ja non-stop punnituksen havaitsemisalueen läpi kulkevat kuorma-autot voidaan erottaa tarkasti.
2.2. Ulkovarusteiden käyttöönotto
Kuva 2 on tyypillinen suorien valvonta-asemien asettelukaavio, ja taulukko 1 on päälaitteiden toiminnalliset vaatimukset. Kun suora valvontahavaintopiste asetetaan yhdelle päällystetielle, koko tien poikkileikkaukselle tulee asettaa dynaaminen kuorma-asteikko, ja jos koko poikkileikkausta ei voida asettaa olosuhteiden vuoksi, tulee lisätä eristystoimintoja, kuten väärään suuntaan ajamista ja ajamista, jotta ajoneuvot eivät välttyisi punnitsemasta.
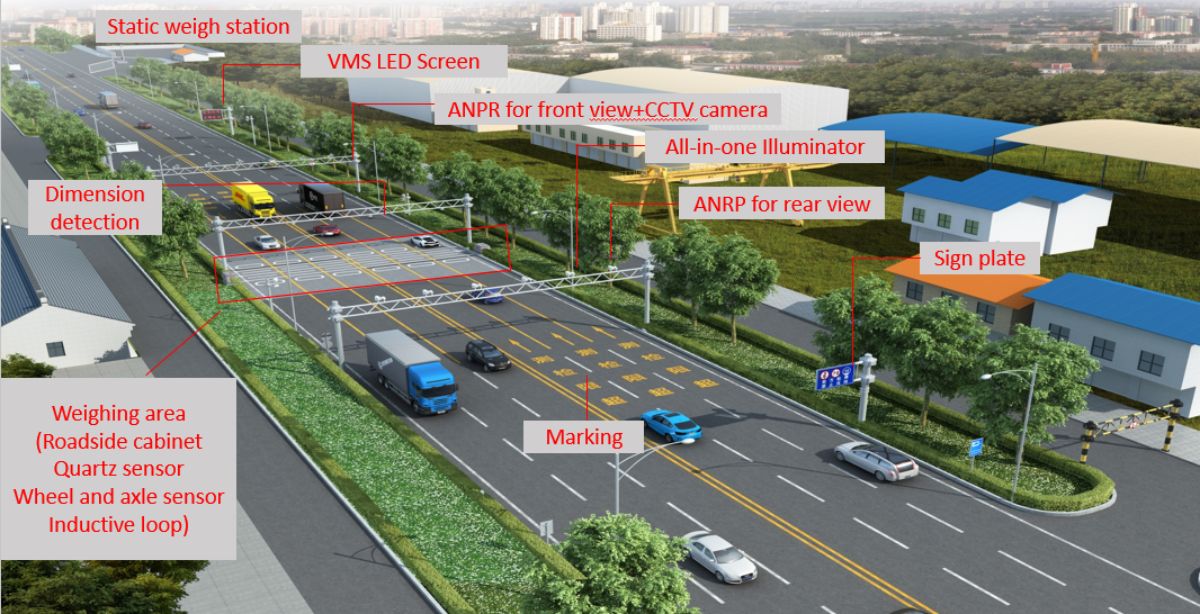
Kuva 2. Tyypillinen kaavio suorasta valvonta-asemasta
Taulukko 1.Avainlaitteen toiminnalliset vaatimukset
| Laitteen nimi | Tärkeimmät ominaisuudet: | |
| 1 | Dynaamiset kuorma-autovaa'at | Se voi tunnistaa automaattisesti ajan, akselien lukumäärän, nopeuden, yhden akselin akselipainon, ajoneuvon ja lastin kokonaispainon, akselivälin ja muut ajoneuvon tiedot; Se voi erottaa tarkasti jonotustilan tavaraajoneuvosta; Se voi käsitellä rahtiajoneuvojen epänormaalia ajotilaa, kuten kaistanvaihtoa ja nopeuden katkaisua; Se voi välittää etuosan kuorma-auton ylitystiedot hallintajärjestelmään reaaliajassa; Se voi kestää keskeytymätöntä jokasään jatkuvaa työtä ilman valvontaa; Siinä pitäisi olla vian itsetestaustoiminto |
| 2 | Rekisterikilven tunnistus- ja sieppauslaitteet | tulee varustaa täyttövalolla tai vilkkuvalla valolla; Se voi selvästi tallentaa rekisterikilven numeron, sillä on ympäristönsuojelukonfiguraatio, ja on suositeltavaa käyttää kolme-yhdessä-täyttövaloa valosaasteiden välttämiseksi; Mahdollisuus kaapata kuvia tavarankuljetusajoneuvojen rekisterikilvestä täysikokoisessa JPG-muodossa; Sen pitäisi pystyä ottamaan 1 teräväpiirtokuva edestä, ja kuvatietojen mukaan sen tulisi pystyä erottamaan selvästi tavaraajoneuvon rekisterikilven alue, etu- ja ohjaamon ominaisuudet sekä auton etuosan väri; Ajoneuvon tunnistus- ja kaappauslaitteiston tulee pystyä kaappaamaan kuva non-stop-punnitusten havaitsemisalueen läpi kulkevasta ajoneuvosta useista kulmista sivulta ja pyrstöstä, ja sen tulee pystyä selvästi erottamaan tavaraajoneuvon akselien lukumäärä, korin väri ja kuljetettavan tavaran perustilanne kuvatietojen mukaan; Ajoneuvon tunnistus- ja talteenottolaitteessa tulee olla vian itsetarkastustoiminto; Epänormaalin tapahtuman talteenottolaite tukee ajoneuvon epänormaalin ylityksen ja tiivistyslinjan havaitsemista. |
| 3 | Videovalvontalaitteet | Oikeuslääketieteellisten kuvien tulee olla vähintään 2 miljoonan pikselin kokoisia, ja niiden on oltava suojattuja. |
| 4 | Tietojen julkaisulaitteet | Sen pitäisi pystyä luovuttamaan ajoneuvon ylityksen havaitsemistiedot reaaliajassa ylivuotoajoneuvon kuljettajalle, ja sen pitäisi pystyä toteuttamaan tekstin vuorottelua, vieritystä ja muita näyttömenetelmiä. |
Kun ajoneuvon havaitaan olevan ylikuormitettu, näytetään rekisterikilpi muuttuvan informaatiotaulun kautta ja ajoneuvo ohjataan läheiseen ylikuormitetun kuljetuspisteen käsittelyyn. Tietotaulun ja dynaamisen kuorma-autovaa'an välisen asetusetäisyyden tulee täyttää ajoneuvon näkyvyyden vaatimukset, ja on suositeltavaa valita sopiva muuttuva opastaulutyyppi ja asetusetäisyys tieolosuhteiden mukaan; Kun tietotaulun ja dynaamisen kuorma-autovaa'an välinen etäisyys ei täytä kuljettajan näkyvyysvaatimuksia tielinjausolosuhteiden vuoksi, on suositeltavaa rajoittaa kuorma-auton ajonopeutta tai säätää opastetaulun LED-hiukkasten kulmaa kuljettajan näkyvyysajan parantamiseksi.
3. Toimenpiteiden suunnittelu punnitusvirheiden vähentämiseksi
Rangaistusstandardin ylikuormitusjaon vaatimusten mukaan ajonopeuden ollessa 1-80 km/h ajoneuvon ja lastin kokonaispainon dynaamisessa punnituksessa tulee täyttää tarkkuustason 10 vaatimukset, eikä prosenttiosuus sovitusta todellisesta ajoneuvon kokonaispainosta ylitä ensimmäisen ja myöhemmän tarkastuksen virhettä.
± 5,00 % ja testivirhe käytössä ei ylitä ±10,0 %.
Päällystystekijöiden punnitukseen aiheuttaman virheen vähentämiseksi päällysteen punnitukseen vaikuttavalla alueella ennen ja jälkeen punnituslaitteiden tulee täyttää seuraavat vaatimukset:
1) Pitkittäinen kaltevuus ei saa olla yli 2%, ja päällysteen sivuttaiskaltevuus ei saa olla yli 2%;
2) kun sementtipäällysteellä, täyttösementtibetonin ja olemassa olevan sementtipäällysteen väliin on järjestetty muodonmuutossauma, sidetanko ja täyteaine;
3) Asfalttipäällysteellä täyttösementtibetonin ja olemassa olevan asfaltin pintakerroksen välillä otetaan käyttöön gradienttisiirtymä. Suuntavalvonta-asema
valintapisteitä tulee välttää asentamasta seuraaville tieosuuksille:
1) Tieosuus 200 metrin säteellä tasaisesta risteyksestä;
2) ajokaistan määrä muuttuu tieosuudella;
3) ylikulkusilta (aerodynaaminen vaikutus) ja lähestymissilta (huono tasaisuus);
4) siltojen tai muiden rakenteiden osat, joilla on dynaaminen vaikutus ajoneuvoihin;
5) Radiolähetysasemien alla tai lähellä olevat osat ja suurjännitejohtojen alla olevat rautatiekiskot.
Lisäksi ajoneuvon ajokäyttäytymisestä aiheutuvan punnitusvirheen vähentämiseksi punnitusosassa tulee tehdä seuraavat toimenpiteet:
1) Kun ajokaista on monikaistainen, ajoradan jakoviiva on yhtenäinen, ja ajoneuvojen vaihtaminen on kielletty;
2) Kun tieosuuden linjaus on hyvä ja helppo nopeuttaa, aseta kuorma-auton nopeusrajoitusmerkki punnituksen havaitsemisalueen eteen;
3) Jotta voidaan torjua tahallisesti rangaistuksia kiertäviä ajokäyttäytymistä, kuten rekisterikilpien lukitseminen, väärään suuntaan ajaminen, jonottaminen ja takaluukku, voidaan lisätä laittomia sieppaus- ja tunnistuslaitteita.
Johtopäätös
Yhteenvetona voidaan todeta, että suorien toimeenpanon havainnointipisteiden sijoittelu tulee määrittää kokonaisvaltaisesti alueellisen tieverkoston, tieolosuhteiden ja ympäröivän ympäristön kokonaisvaltaisen huomioimisen jälkeen ja virheiden vähentämisen suunnittelu tulee tehdä asennuspaikan tieolosuhteiden mukaan käyttö- ja kunnossapitoprosessin virheiden vähentämiseksi. Punnitsevan rakentamisen kustannusten alentamiseksi kokonaissuunnittelun ja layout-pisteiden järkevän valinnan lisäksi on myös tarpeen selkeyttää hallintoviranomaista, koordinoida johtamista useista osastoista ja eri näkökulmista sekä pyrkiä vähentämään ylikuormituskäyttäytymistä lähteestä.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdun toimisto: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Hongkongin toimisto: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Tehdas: Building 36, Jinjialinin teollisuusalue, Mianyang City, Sichuanin maakunta
Postitusaika: 09.03.2024




