
Ensinnäkin järjestelmän koostumus
1. Maanteiden ylikuormituksen non-stop tunnistusjärjestelmä koostuu yleensä etupään tavaraajoneuvojen ylikuormitusta koskevien tietojen keruu- ja rikosteknisestä järjestelmästä sekä tavaraajoneuvojen takaosan ylikuormitustietojen hallinnasta.
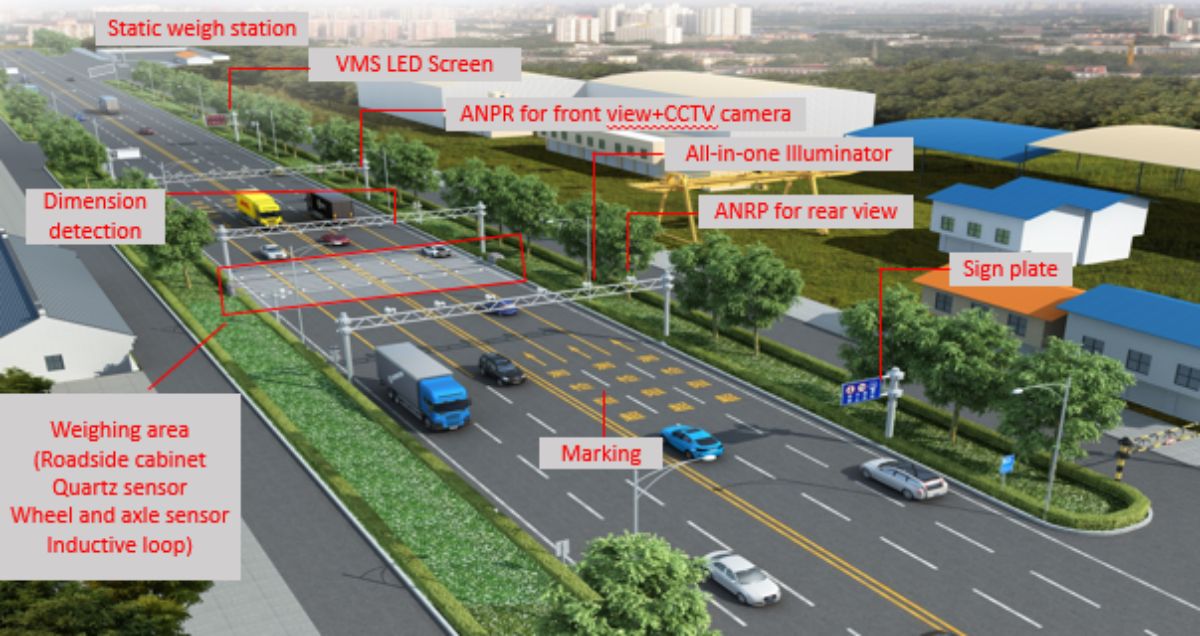
2. Tavaraajoneuvojen etupään ylikuormitustietojen keruu- ja rikostekninen järjestelmä koostuu yleensä non-stop punnituslaitteista, ajoneuvon profiilikoon tunnistuslaitteista, rekisterikilven tunnistus- ja talteenottolaitteista, ajoneuvon ilmaisimesta, videovalvontalaitteista, tiedonsiirtolaitteista, liikennemerkeistä, virransyöttö- ja salamansuojauslaitteista, paikan päällä olevista ohjauskaapeista, tiedonkeruu- ja -käsittely- ja verkkolähetyslaitteista, liikennemerkkien ja pysähdyksen tunnistusalueista, punnitus- ja merkintäalueista.
3. Tavaraajoneuvojen ylikuormitustietojen hallinta-alusta (mukaan lukien suora täytäntöönpano) koostuu yleensä maakuntien (piirin), kuntien ja maakuntien ylikuormitustiedonhallintaalustoista (mukaan lukien suora täytäntöönpano).
2. Toiminnalliset vaatimukset
1. Non-stop-punnituslaitteiden toiminnalliset vaatimukset
1.1 Toimintanopeusalue
Non-stop-punnituslaitteiston nopeusalue on (0,5-100) km/h, jotta rahtiajoneuvot kulkevat non-stop-havaintoalueen läpi.
1.2 Ajoneuvon kokonaispainon tarkkuustaso
(1) Ajoneuvon ja lastin kokonaispainon punnituksen suurin sallittu virhe pysähtymättömän punnituslaitteen sallitulla käyttönopeusalueella ei saa olla pienempi kuin JJG 907 "Dynamic Highway Vehicle Automatic Weighing Apparatus Verification Regulations" (2-1Table) tarkkuustasojen 5 ja 10 määräykset ja vaatimukset.
Taulukko 2-1 Ajoneuvon kokonaispainon dynaamisen punnituksen suurin sallittu virhe
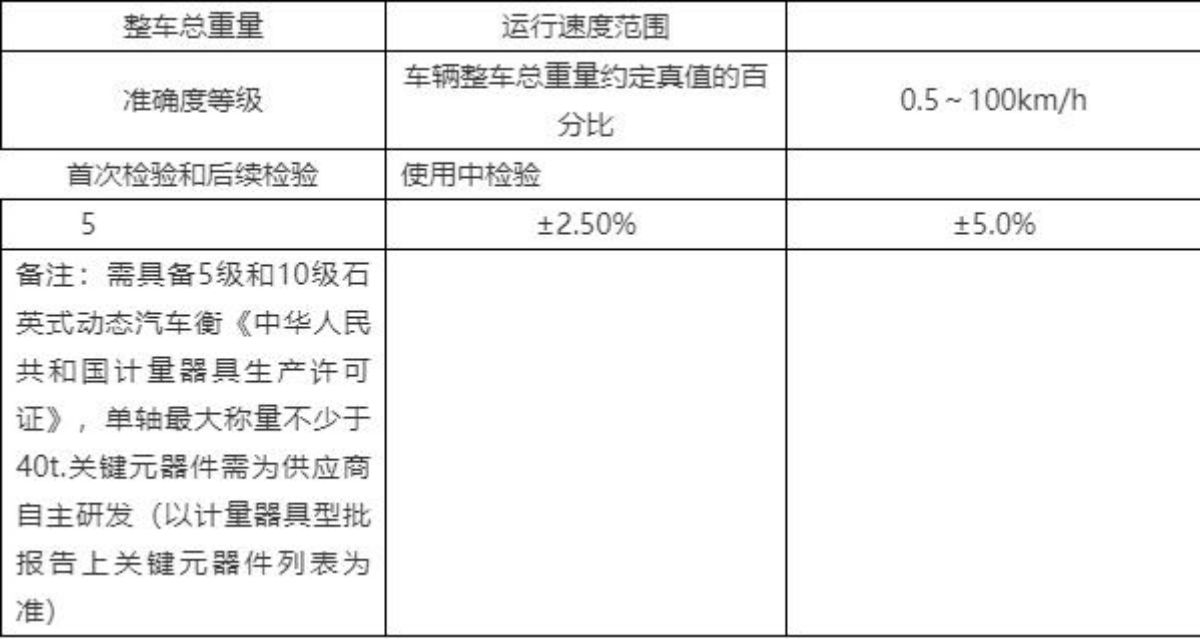
(2) Kun rahtiajoneuvo kulkee pysähtymättömän punnituksen havaitsemisalueen läpi epätavallisilla ajokäyttäytymisillä, kuten usein kiihdyttämällä ja hidastuen, hyppäämällä, pysähdyksillä, S-kaarella, ylityksellä, painelinjalla, peruuttamalla tai pysähtymällä lyhyessä ajassa, ajoneuvon kokonaispainon tarkkuustaso ei saa olla pienempi kuin ei-stop-vaatimuksia. 2-1. (Kaistojen painaminen ja vastakkaiseen suuntaan ajaminen ovat tärkeitä).
1.3 Non-stop-punnituslaitteistossa käytetyn punnituskennon on täytettävä GB/T7551 "Load Cell" -määräykset ja -vaatimukset, käyttöiän on oltava ≥ 50 miljoonaa akselia ja non-stop-punnituksissa käytettävän punnituskennon suojaustason on oltava vähintään IP68. .
1.4 Non-stop-punnitusten keskimääräisen häiriöttömän työajan on oltava vähintään 4000h ja avainkomponenttien takuuajan on oltava vähintään 2 vuotta ja käyttöiän vähintään 5 vuotta.
1.5 Virransuojausvaatimukset
(1) Kun virta on katkaistu, non-stop-punnituslaitteen tulisi pystyä tallentamaan automaattisesti tällä hetkellä asetetut parametrit ja punnitustiedot, ja säilytysajan on oltava vähintään 72 tuntia.
(2) Sähkökatkon sattuessa jatkuvan punnituslaitteen sisäisen kellon käyntiajan on oltava vähintään 72 päivää.
1.6 Korroosionestokäsittelyvaatimukset
Pysähtymättömän punnituslaitteen paljaat metalliosat tulee käsitellä korroosionestokäsittelyllä asiakirjan GB/T18226 "Teräskomponenttien korroosionestoa koskevat tekniset ehdot moottoritieliikenteen suunnittelussa" asiaa koskevien määräysten mukaisesti.
1.7 Pysähtymättömän punnituslaitteiston ajoneuvotunnistimen nopeusmittausvirheen tulee olla ≤± 1 km/h ja liikennevirran ilmaisun tarkkuuden ≥99 %.
1.8 Non-stop-punnituslaitteiden ajoneuvojen erottimien tekniset vaatimukset ovat seuraavat:
(1) Akseleiden lukumäärän tunnistustarkkuuden tulee olla ≥ 98 %.
(2) Akselivälin tunnistusvirheen tulee olla ≤ ± 10 cm.
(3) Ajoneuvojen luokituksen tarkkuuden tulisi olla ≥ 95 %.
(4) Kanavien välisen tunnistussuhteen tulisi olla ≥ 98 %.
1.9 Sovellettavan työympäristön lämpötila-alueen tulee olla -20°C~+80°C, ja ympäristön kosteudenkestävyyden teknisten indikaattoreiden tulee täyttää JT/T817:n "Maanteiden sähkömekaanisten järjestelmien yleiset tekniset vaatimukset ja testausmenetelmät" -säännökset ja -vaatimukset.
1.10 Sade- ja pölytiiviitä toimenpiteitä tulee toteuttaa, ja suojatason tulee täyttää JT/T817:n vaatimukset ja vaatimukset.

2. Ajoneuvon profiilikoon testauslaitteiden toiminnalliset vaatimukset
2.1 Kun rahtiajoneuvo kulkee non-stop-punnitusten havaitsemisalueen läpi nopeudella (0,5-100) km/h, sen tulee pystyä automaattisesti suorittamaan reaaliaikainen nopea tavara-ajoneuvon pituuden, leveyden ja korkeuden geometristen mittojen ja 3D-mallin tunnistus ja antamaan oikeat tunnistustulokset. Vasteaika ei saa olla alle 30 ms, ja aika yksittäisen havainnoinnin ja tulosteen suorittamiseen saa olla enintään 5 sekuntia.
2.2 Tavaraajoneuvon pituuden, leveyden ja korkeuden geometrisen mittausalueen tulee täyttää taulukon 2-2 vaatimukset.
Taulukko 2-2 Ajoneuvon profiilikoon testauslaitteiden mittausalue
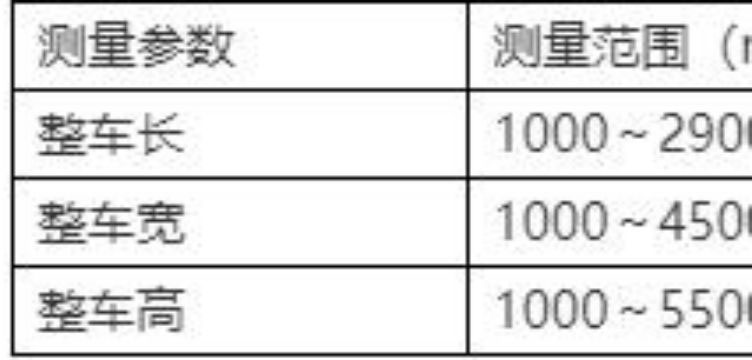
2.3 Tavaraajoneuvon pituuden, leveyden ja korkeuden geometristen mittojen mittausresoluutio on enintään 1 mm, ja ajoneuvon ääriviivamittauslaitteiston mittausvirheen tulee täyttää seuraavat vaatimukset alueella 1–100 km/normaali käyttönopeus: (ajonopeuden tulee olla yhdenmukainen edellisen dynaamisen punnituslaitteen vaatimusten kanssa).
(1) Pituusvirhe ≤ ± 500 mm;
(2) Leveysvirhe ≤ ± 100 mm;
(3) Korkeusvirhe ≤ ± 50 mm.
2.4 Ajoneuvon profiilin koon testauslaitteiden laserpistetunnistuksen taajuuden tulee olla ≥1kHz, ja siinä tulee olla 9 tyyppiä ajoneuvomalleja ja ajoneuvon nopeuden tunnistustoimintoja, jotka on määritelty moottoriajoneuvon GB1589 "Autojen, perävaunujen ja autojunien äärimitta-, akselikuormitus- ja laaturajoitukset" -kohdassa.
2.5 Sillä pitäisi olla rinnakkaisten rahtiajoneuvojen, S-kaaren ajotilan arvioinnin, mustan materiaalin suojauksen ja korkean heijastavuuden materiaalin rahtiajoneuvon profiilin geometrisen koon tunnistustoiminnot.
2.6 tulisi olla tavaraliikenteen moottoriajoneuvojen mallien luokittelu, liikenteen määrä, sijainnin nopeus, etumatka, autojen prosenttiosuus, etuetäisyys, käyttöajan havaitsemistoiminnot. Ja tavaraliikenteen moottoriajoneuvomallien luokitustarkkuuden tulee olla ≥ 95 %.
2.7 Sovellettavan työympäristön lämpötila-alueen tulee olla -20 °C ~ +55 °C, ja ympäristön kosteudenkestävyyden teknisten indikaattoreiden tulee täyttää JT/T817:n "Maanteiden sähkömekaanisten järjestelmien yleiset tekniset vaatimukset ja testausmenetelmät" -säännökset ja -vaatimukset.
2.8 Laser-ajoneuvon profiilikoon testauslaitteet tulee asentaa huoltokanavalla varustetulla portaalilla
2.9 Ajoneuvon profiilikoon testauslaitteiston suojaustaso ei saa olla pienempi kuin IP67.
3. Rekisterikilven tunnistus- ja sieppauslaitteiden toiminnalliset vaatimukset
3.1 Rekisterikilpien tunnistus- ja sieppauslaitteiden toiminnallisten vaatimusten on täytettävä GB/T 28649 "Automaattinen tunnistusjärjestelmä moottoriajoneuvojen rekisterikilpeille" asiaankuuluvat määräykset ja vaatimukset.
3.2 Rekisterikilven tunnistus- ja sieppauslaitteet on varustettava täyttövalolla tai vilkkuvalla valolla, jonka on pystyttävä selvästi tallentamaan non-stop punnituksen havaitsemisalueen läpi kulkevan ajoneuvon numero kaikissa sääolosuhteissa ja antamaan oikea tunnistustulos.
3.3 Rekisterikilven tunnistus- ja sieppauslaitteiston tulee olla ≥ 99 % rekisterikilven tunnistustarkkuudesta päivällä ja ≥ 95 % rekisterikilven tunnistuksen tarkkuudella yöllä, ja tunnistusajan tulee olla enintään 300 ms.
3.4 Kerätyn tavara-ajoneuvon rekisterikilven kuva tulee tulostaa selkeästi täysleveänä JPG-muodossa ja tunnistustuloksen tulee sisältää tunnistusaika, rekisterikilven väri jne.
3.5 Rekisterikilven tunnistuksen kaappauskuvapikseliä ei saa olla alle 5 miljoonaa, muiden kaappauskuvapikseleiden tulee olla vähintään 3 miljoonaa, rahtiajoneuvojen non-stop punnituksen tunnistusalueen läpi tulee kaapata ajoneuvon etuosa, ajoneuvon kaksi sivua ja ajoneuvon takaosa yhteensä vähintään 4 teräväpiirtokuvaa.
3.6 Etuosan teräväpiirtokuvatietojen mukaan tavaraajoneuvon rekisterikilven alueen, etuosan ja ohjaamon ominaisuuksien, etuvärin jne. tulee pystyä selvästi erottamaan akselien lukumäärä, korin väri ja kuljetettavan tavaran perustilanne ajoneuvon kyljessä olevien teräväpiirtokuvatietojen mukaan; Ajoneuvon takaosan teräväpiirtokuvatietojen mukaan voidaan erottaa hännän rekisterinumero, korin väri ja muut tiedot.
3.7 Jokaisen kuvan päälle tulee lisätä tietoja, kuten havaitsemispäivämäärä, testausaika, testauspaikka, ajoneuvon ja lastin kokonaispaino, ajoneuvon mitat, kuvan rikosteknisten laitteiden numero, väärentämisen esto ja muut tiedot.
3.8 Kaapatun kuvainformaation siirtokanavan kaistanleveys ei saa olla pienempi kuin 10 Mbps.
3.9 Siinä pitäisi olla vian itsetarkistustoimintoja, kuten epänormaali tiedonsiirto ja sähkökatkos.
3.10 Sovellettavan työympäristön lämpötila-alueen tulee olla -20 °C ~ +55 °C, ja ympäristön kosteudenkestävyyden teknisten indikaattorien tulee täyttää JT/T817:n "Maanteiden sähkömekaanisten järjestelmien yleiset tekniset vaatimukset ja testausmenetelmät" -säännökset ja -vaatimukset.
3.11 Rekisterikilven tunnistus- ja sieppauslaitteiden suojaustason on oltava vähintään IP67.
4 Videovalvontalaitteiden toiminnalliset vaatimukset
4.1 videovalvontakameralla tulisi olla infrapuna-päivä- ja yökameratoiminto, ja sen pitäisi pystyä mittaamaan non-stop-havainnointialuetta monipuolisen kameratoiminnon ja säästämään vähintään 10 sekuntia laittomien tavarankuljetusajoneuvojen ylikuormituksen todisteiden keräämisestä videodataa.
4.2 Siinä tulisi olla itsediagnostiikka, näkökentän kalibrointi ja automaattinen kompensointi.
4.3 Oikeuslääketieteellisten videokuvien tulee olla vähintään 3 miljoonaa pikseliä, ja niiden tulee olla selkeitä ja vakaita.
4.4 Sillä pitäisi olla kierto- ja zoomaustoiminto, ja vaaka- ja pystykierto sekä objektiivin zoomaus voidaan suorittaa ohjauskomennon mukaan.
4.5 Sen tulee puhdistaa ja poistaa sade- ja pakkassumuvalot, ja sen tulee kyetä puhdistamaan, lämmittämään ja sulattamaan suojakansi ajoissa.
4.6 Oikeuslääketieteelliset videokuvat tulee lähettää läänin (kaupunki) tason ylikuormitustietojen hallintaan ja suoraan täytäntöönpanoalustalle reaaliajassa.
4.7 Videovalvontalaitteiden ja sen lisälaitteiden muiden teknisten indikaattorien on täytettävä GA/T995:n asiaa koskevat määräykset ja vaatimukset.
4.8 Sovellettavan työympäristön lämpötila-alueen tulee olla -20°C~+55°C, ja ympäristön kosteudenkestävyyden teknisten indikaattoreiden tulee täyttää JT/T817:n "Maanteiden sähkömekaanisten järjestelmien yleiset tekniset vaatimukset ja testausmenetelmät" -säännökset ja -vaatimukset.
5 Tiedonjulkaisulaitteiden toiminnalliset vaatimukset
5.1 Sen pitäisi pystyä luovuttamaan reaaliaikaista tietoa ajoneuvon ylikuormituksesta laittoman ajoneuvon kuljettajalle.
5.2 Sen pitäisi pystyä julkaisemaan ja näyttämään tietoja, kuten tekstin vuorottelua ja vieritystä.
5.3 Valtateiden LED-muuttuvien opasteiden päätoimintojen ja teknisten merkkivalojen on täytettävä GB/T23828 "Highway LED Variable Information Signs" -säännökset ja -vaatimukset.
5.4 Kaksipylväinen portaalityyppinen valtatie LED-muuttuva tietokylttinäyttö yleisesti käytetty pikseliväli voidaan valita: 10mm, 16mm ja 25mm. Neljän ja kuuden kaistan näyttöalueen koko voi olla 10 neliömetriä ja 14 neliömetriä. Näyttösisällön muoto voi olla 1 rivi ja 14 saraketta.
5.5 Yksisaraisen valtatien LED-muuttuvan tietokylttinäytön pikselivälit voidaan valita: 10mm, 16mm ja 25mm. Näytön koko voidaan valita 6 neliömetristä ja 11 neliömetristä. Näyttösisällön muoto voi olla 4 riviä ja 9 saraketta.
5.6 Valtatien muuttuvien LED-tietokylttien suunnittelussa ja asettamisessa sekä visuaalisen tunnistusetäisyyden tulee ottaa täysin huomioon tavaraajoneuvojen todelliset nopeus- ja visuaaliset tunnistustarpeet tieosuudella ja täyttää GB/T23828 "Highway LED Variable Information Signs" -säännökset ja -vaatimukset.
6 Liikennemerkkien asetusvaatimukset
6.1 Asenna liikennemerkki "non-stop punnitus- ja havaintoalueelle" pääsyä varten vähintään 200 metrin etäisyydelle non-stop punnituksen havaitsemisalueen edessä.
6.2 Asenna "kaistanvaihto kielletty" -liikennemerkki vähintään 150 metrin päähän non-stop punnituksen havaitsemisalueen eteen.
6.3 Pysähtymättömän punnituksen havaitsemisalueen taakse vähintään 200 metrin etäisyydelle liikennemerkki "Nosta kaistanvaihtokielto".
6.4 Liikennemerkkien asettamisen non-stop-punnitushavaintoalueelle tulee noudattaa GB5768 "Tieliikennemerkit ja -merkinnät" suunnittelua ja vaatimuksia.
7. Virransyöttölaitteiden ja ukkossuojamaadoituksen vaatimukset
7.1 Ylikuormitustiedonkeruu- ja rikostekninen järjestelmä on varustettava vakailla ja luotettavilla virransyöttölinjoilla, jotka pystyvät täyttämään 24 tunnin keskeytymättömän virransyöttötoiminnan vaatimukset.
7.2 Ylikuormitustiedonkeruu- ja rikosteknisen järjestelmän tehonsyöttörajapinnalle ja ohjausliitännälle ja niihin liittyville komponenteille on suoritettava tarvittavat salaman- ja ylijännitesuojatoimenpiteet, ja suojatoimenpiteiden on oltava JT/T817 "Maanteiden sähkömekaanisten järjestelmien yleiset tekniset vaatimukset ja testausmenetelmät" asiaa koskevien määräysten ja vaatimusten mukaiset.
7.3 Ylikuormitustiedonkeruu- ja rikosteknisen järjestelmän tulisi ottaa käyttöön yhden pisteen lähimaadoitusmenetelmä ja DC-rinnakkaismaadoitusmenetelmä.
7.4 Ylikuormitustiedonkeruu- ja rikosteknisten laitteiden ukkossuojan ja sähkövastuksen tulee olla ≤ 10 Ω ja suojamaadoitusresistanssin on oltava ≤ 4 Ω.
8 Kenttäkytkentäkaapin toiminnalliset vaatimukset

8.1 Ylikuormitustiedonkeruu- ja rikosteknisellä järjestelmällä konfiguroidun paikan päällä olevan ohjauskaapin pitäisi pystyä tallentamaan tiedonkeruuprosessoreja, ajoneuvon ilmaisimia, verkkokytkimiä ja muita laitteita. Sen pitäisi pystyä lataamaan kuorma-auton ylikuormitustiedot Provincial Department of Transportation Information Center Traffic Comprehensive Administrative Direct Enforcement Platform -alustalle ja kyettävä välittämään kuorma-auton ylikuormitustiedot valtatien LED-muuttuvien tietomerkkien reaaliajassa vapauttamista ja näyttöä varten.
8.2 Ohjauskaappi on suunniteltava kaksikerroksisella alustatiivisteellä, joka estää tehokkaasti pölyn ja sateen, ja siinä on oltava itsenäinen lämpötilansäätöjärjestelmä.
8.3 Ohjauskaappi tulee suunnitella raoilla toimintojen laajentamisen helpottamiseksi.
8.4 Ohjauskaappi on varustettava tietoturvalaitteilla, jotta vältetään rajan ylittävien havainnointitietojen vuotaminen.
9. Vaatimukset jatkuvan punnitusalueen perustamiselle maanteiden ylikuormitusta varten
9.1 Pysähtymättömän punnituksen havaitsemisalue koostuu non-stop-punnitusvälineen kannattimesta (kvartsikideanturi) ja sen ohjausosista etu- ja takapäässä (edessä 30 metriä ja takana 15 metriä karkaistun tienpinnan mukaan) (Kuva 2-1).

Kuva 2-1 Kaaviokaavio non-stop punnitusalueesta
9.2 Pysähtymättömän punnitus- ja testausalueen sijainti ei saa olla tasainen, pitkittäiskäyrän säde on pieni, näköetäisyys huono ja pitkät alamäet ja muut tieosuudet, ja lineaaristen osoittimien tulee täyttää ASTM E1318 "Standard Specification for Highway Weigh-In-Motion Systems and with User Motion (WIM)" -vaatimukset. Menetelmät, erityisvaatimukset ovat seuraavat:
(1) Tien keskilinjan 60 metrin ohjausosuuden ja takaosan 30 metrin ohjaustieosuuden kääntösäteen tulee olla ≥ 1,7 km.
(2) Tien pinnan pituussuuntaisen kaltevuuden etupuolella 60 metrin ohjausosuudella ja takimmaisen 30 metrin ohjaustien osuudella non-stop-punnitusten havaitsemisalueella tulee olla ≤2%.
(3) Pysähtymättömän punnituksen havaitsemisalueen etummaisen 60 metrin ohjaustieosuuden ja takimmaisen 30 metrin ohjaustieosuuden päällysteen poikittaiskaltevuuden i tulee olla 1 % ≤ i ≤2 %.
(4) Ei saa olla esteitä, jotka estävät kuljettajan näkökentän 150 metrin opasteiden osuudella ennen non-stop-punnitusten havaitsemisaluetta.
(5) Pysähtymättömän punnitus- ja havaintoalueen sijainnin ja valtatietunnelin sisään- ja ulostulon välinen etäisyys samalla tieosuudella ei saa olla pienempi kuin 2 km ja vähintään 1 km.
(6) Anturin ja tienpinnan välisen yhteyden vaakasuora virhe on enintään 0,1 mm
9.3 Pysähtymättömän punnitustietojen tarkkuuden ja ajoturvallisuuden varmistamiseksi 60 m:n etummaisen opastieosuuden ja non-stop-punnitusten havaitsemisalueen takimmaisen 30 m:n ohjaustieosuuden ajokaistaeristys tulee eristää yhtenäisellä viivalla.
9.4 Non-stop punnitus- ja testausalue tieosuuksien rakentamisen ohjaamiseksi
(1) Ohjaustien tienpohjan tulee olla vakaa ja päällysteen kitkakertoimen tulee täyttää tieosuuden suunnitteluvaatimukset.
(2) Ohjaustien päällystepinnan tulee olla tasainen ja tiivis, eikä asfalttipäällysteessä saa olla uraa, kuoppia, vajoamista, ruuhkaa, halkeamia, verkkohalkeamia ja pullistumia, eikä sementtipäällysteessä saa olla porrastettua, rikkoutunutta levyä, vajoamista, mudan kertymistä tai muita sairauksia. Sementtibetonipäällysteen ja asfalttibetonipäällysteen tasaisuuden tulee täyttää JTGF80-1 "Maantietekniikan laaduntarkastus- ja arviointistandardit" asiaankuuluvat määräykset ja vaatimukset.
(3) Ohjaavan tieosuuden tienpinnan leveyden tulisi kestää punnitusalueen leveimmän tavaraajoneuvon normaali kulku.
(4) Jalkakäytävän keskiviiva non-stop punnitus- ja testausalueella on eristettävä kaksinkertaisella keltaisella (yksittäisellä keltaisella) yhtenäisellä viivalla ja kaistan rajausviiva on eristetty valkoisilla yhtenäisillä viivoilla.
3. Liitäntäprotokollaa ja datamuotoa koskevat vaatimukset
Moottoritien ylikuormituksen non-stop-ilmaisujärjestelmän liitäntäprotokollan ja tietomuodon tulee täyttää Fujianin liikenteen kattavan hallinnollisen suoran täytäntöönpanon suunnittelusuunnitelman asiaankuuluvat määräykset ja vaatimukset, jotta varmistetaan yhteenliittäminen ja tiedon jakaminen läänin (piirin), kuntien ja maakuntien ylikuormituksen tiedonhallintaalustojen (mukaan lukien suora valvonta) välillä.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdun toimisto: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Hongkongin toimisto: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Tehdas: Building 36, Jinjialinin teollisuusalue, Mianyang City, Sichuanin maakunta
Postitusaika: 25.1.2024




